


airplane autopilot NEW V5 plus Autopilot Pixhack Flight Controller for VTOL
$342.00 $450.00
airplane autopilot NEW V5 plus Autopilot Pixhack Flight Controller for VTOL
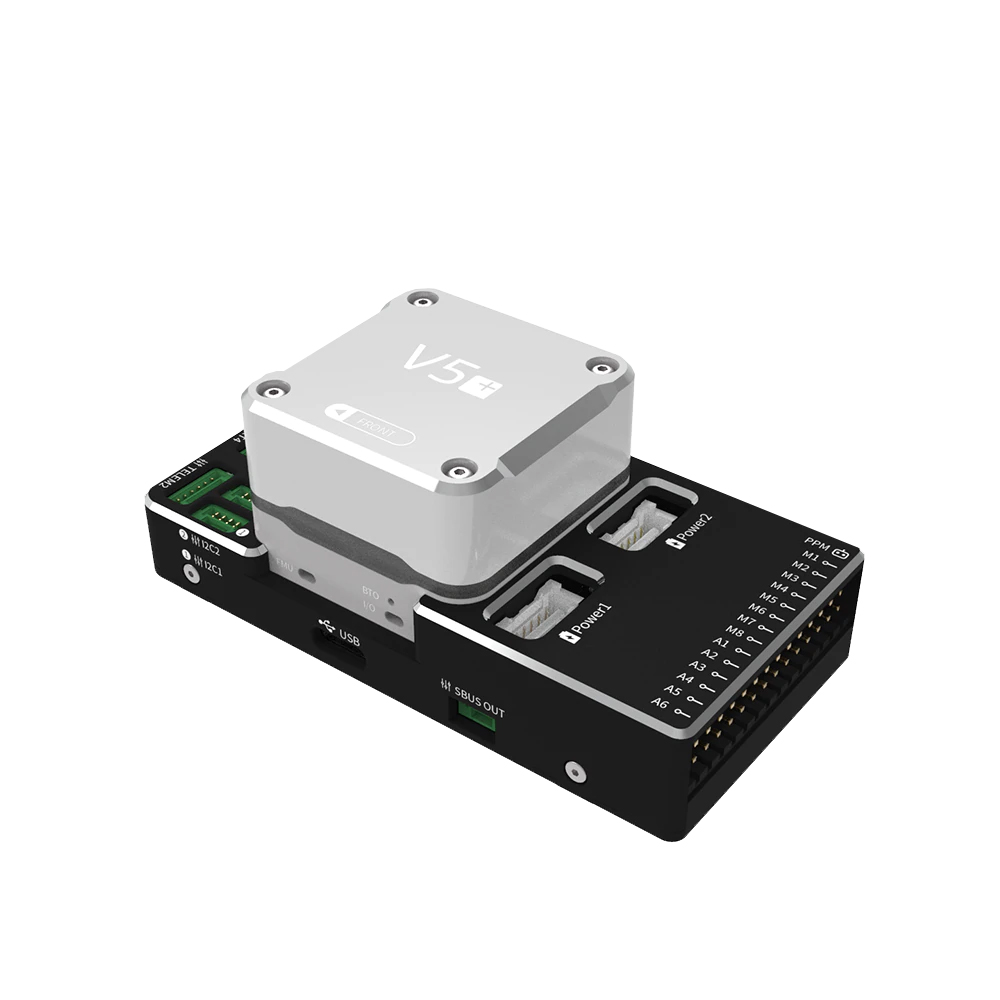
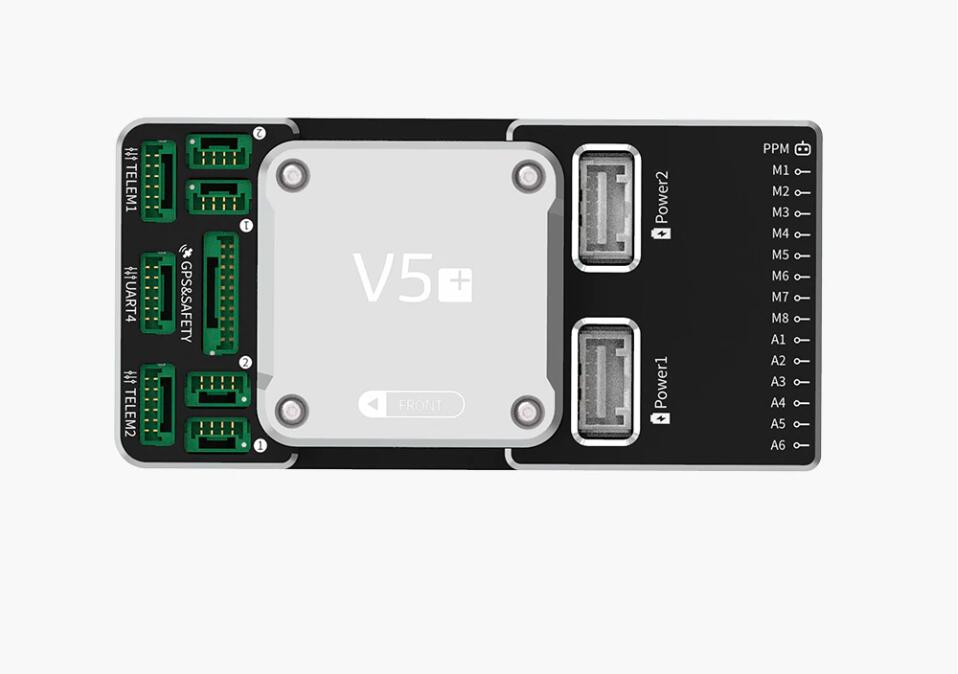
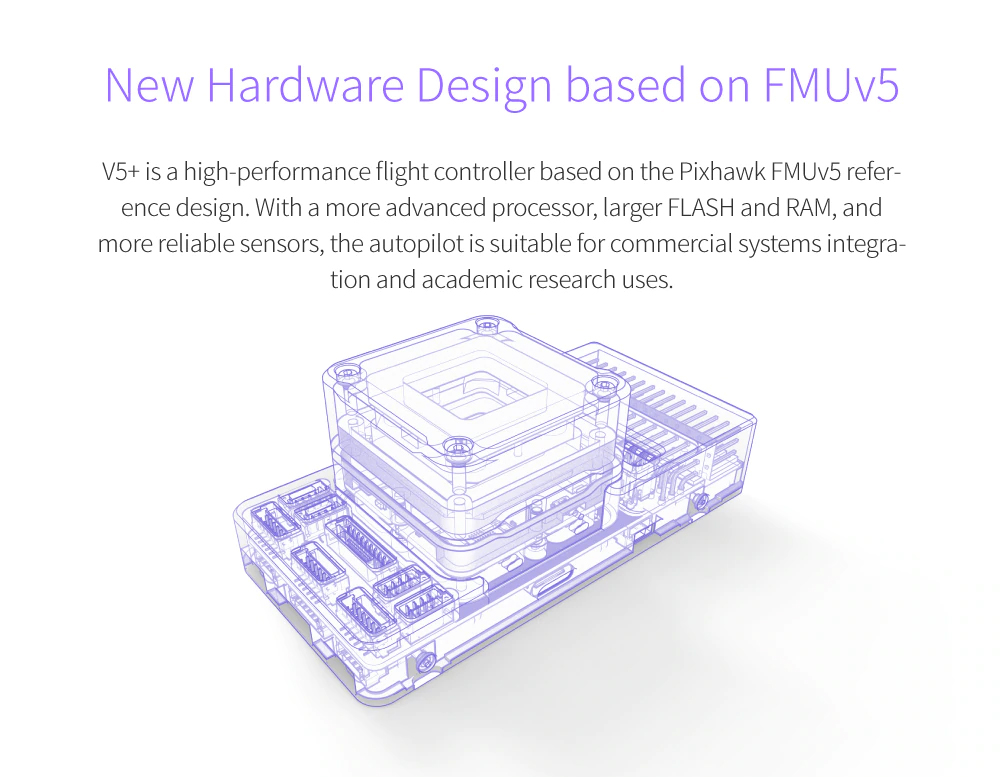
airplane autopilot is an advanced autopilot for academic and commercial integrators. Designed by CUAV in collaboration with the PX4 team. Based on the Pixhawk FMU v5 open hardware design, a highly modular board using Pixhawk standard pinouts for its external interface, allowing for carrier board integration. Out of the box pre-installed with PX4 Open Source Autopilot, and fully supported by ArduPilot.
An autopilot is a system used to control the trajectory of an aircraft without constant ‘hands-on’ control by a human operator being required. Autopilots do not replace human operators, but instead they assist them in controlling the aircraft. This allows them to focus on broader aspects of operations such as monitoring the trajectory, weather and systems.[1] The autopilot is often used in conjunction with the autothrottle, when present, which is the analogous system controlling the power delivered by the engines.
airplane autopilot Quick Summary
- Main FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- IO Processor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
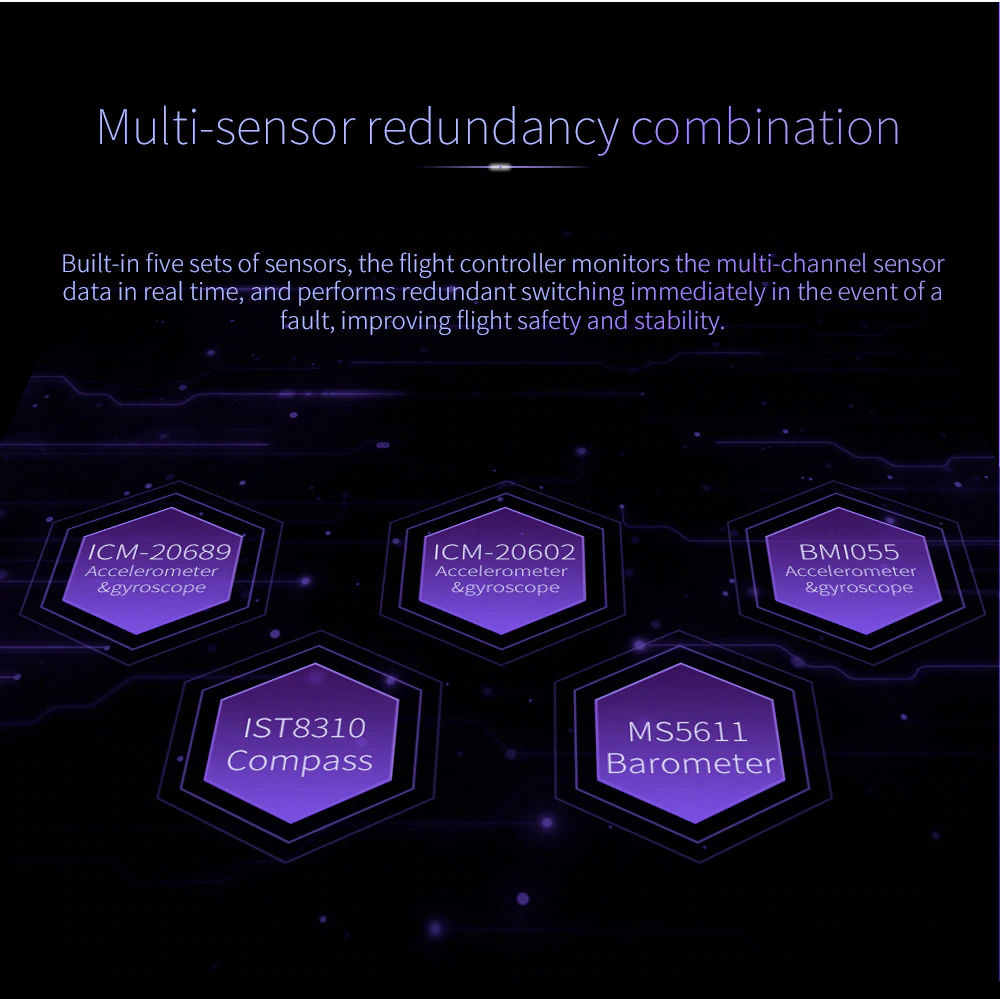
- On-board sensors:
- Accelerometer/Gyroscope: ICM-20689
- Accelerometer/Gyroscope: BMI055
- Magnetometer: IST8310
- Barometer: MS5611
- Interfaces:
- 8-14 PWM outputs (6 from IO, 8 from FMU)
- 3 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for CPPM
- Dedicated R/C input for PPM and S.Bus
- analog / PWM RSSI input
- S.Bus servo output
- 5 general purpose serial ports
- 4 I2C ports
- 4 SPI buses
- 2 CANBuses with serial ESC
- Analog inputs for voltage / current of 2 batteries
- Power System:
- Power: 4.3~5.4V
- USB Input: 4.75~5.25V
- Servo Rail Input: 0~36V
- Weight and Dimensions:
- Weight: 90g
- Dimensions: 85.5*42*33mm
- airplane autopilot Other Characteristics:
- Operating temperature: -20 ~ 80°c(Measured value)





| Weight | 3 kg |
|---|---|
| Dimensions | 35 × 30 × 30 cm |
- Interfaces:
- 8-14 PWM outputs (6 from IO, 8 from FMU)
- 3 dedicated PWM/Capture inputs on FMU
- Dedicated R/C input for CPPM
- Dedicated R/C input for PPM and S.Bus
- analog / PWM RSSI input
- S.Bus servo output
- 5 general purpose serial ports
- 4 I2C ports
- 4 SPI buses
- 2 CANBuses with serial ESC
- Analog inputs for voltage / current of 2 batteries
- Power System:
- Power: 4.3~5.4V
- USB Input: 4.75~5.25V
- Servo Rail Input: 0~36V
- Weight and Dimensions:
- Weight: 90g
- Dimensions: 85.5*42*33mm
- Other Characteristics:
- Operating temperature: -20 ~ 80°c(Measured value)
Based on 0 reviews
Be the first to review “airplane autopilot NEW V5 plus Autopilot Pixhack Flight Controller for VTOL”
You must be logged in to post a review.
You may also like…



Related products
-
Accessories, Drone motor, Industrial Drone & UAV parts, Power System & Propeller
powerful drone motors U8II KV100 KV150 KV190 KV85
 Accessories, Drone motor, Industrial Drone & UAV parts, Power System & Propeller
Accessories, Drone motor, Industrial Drone & UAV parts, Power System & Propellerpowerful drone motors U8II KV100 KV150 KV190 KV85
• Flight time 5% longer
• Max. Thrust 7.3kg
• Motor protection IP55
• Motor service life– 1500 flights (40mins/flight)
• ATA01123 prop adapter for P22inch propSKU: 5487FB8/07-47



There are no reviews yet.